Kaicheng Huang
Research Assistant Professor, Department of Materials Science and Engineering, Southern University of Science and Technology (SUSTech)

Room 306, Block 1, Huiyuan
Southern University of Science and Technology
1088 Xueyuan Avenue, Shenzhen 518055, P.R. China
Email: huangkc0907@hotmail.com
Phone: (+86) 15818662698
About
Kaicheng Huang currently holds the position of Research Assistant Professor in the Department of Materials Science and Engineering at the Southern University of Science and Technology (SUSTech), where he is affiliated with the research group led by Prof. Xing Cheng.
His research interests encompass automated micromanipulation, cellular manipulation and impedance characterization, droplet manipulation and impedance measurement, digital microfluidic devices, dynamic control algorithms, optimization algorithms, and optoelectronic tweezers.
Dr. Huang previously served as a Senior Researcher and Postdoctoral Fellow within the same group at SUSTech. Prior to joining SUSTech, he was a Postdoctoral Fellow in the Department of Industrial and Manufacturing Systems Engineering at The University of Hong Kong (HKU), under the supervision of Prof. Ning Xi.
He earned his Ph.D. in Mechanical Engineering from The Hong Kong Polytechnic University (PolyU), where his doctoral research—supervised by Prof. Henry K. Chu—focused on the development of an automated system for cell manipulation and patterning. During his doctoral studies, he also undertook a research internship at the Department of Mechanical and Industrial Engineering, University of Toronto (UoT), under the mentorship of Prof. James K. Mills.
Dr. Huang obtained his M.Sc. in Mechanical and Automation Engineering from The Chinese University of Hong Kong (CUHK) in 2015, where he worked with Prof. Jie Huang. He received his B.Eng. in Automation from the Department of Mechatronic and Control Engineering at Shenzhen University in 2014.
Research
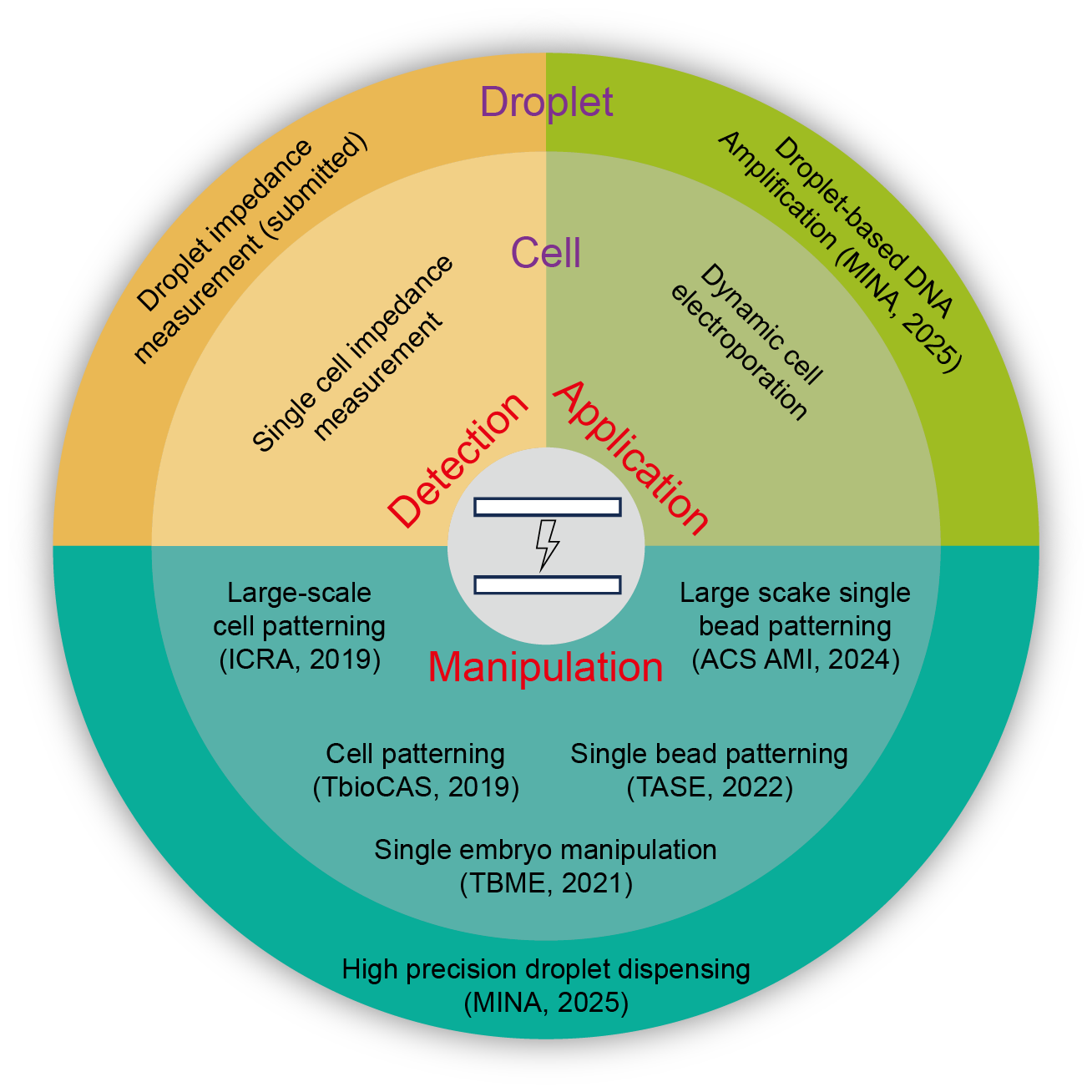
Dr. Huang’s research focuses on the development of electric-based automated micro-manipulation and detection systems and their applications in biomedical engineering. His work integrates robotics, control systems, and microfluidics to address challenges in precision manipulation and detection at the microscale.
Overall, Dr. Huang’s research can be divided into three main directions: manipulation, detection, and application. According to the operation object, it can be categorized into two parts: cell operation and droplet operation.
Education
- Ph.D. in Mechanical Engineering, 2020
Department of Mechanical Engineering, The Hong Kong Polytechnic University
Hong Kong, China - M.Sc. in Mechanical and Automation Engineering, 2015
Department of Mechanical and Automation Engineering, The Chinese University of Hong Kong
Hong Kong, China - B.Eng. in Automation, 2014
Department of Mechatronic and Control Engineering, Shenzhen University
Shenzhen, China
selected publications
- Microsyst. Nanoeng.A high-precision nanoliter droplet dispensing system based on optoelectrowetting with tunable droplet volumeMicrosystems & Nanoengineering, 2025
- ACS Appl. Mater. InterfacesLarge-Scale Selective Micropatterning with Robotics nDEP-Tweezers and Hydrogel EncapsulationACS Applied Materials & Interfaces, 2024
- IEEE Trans. Autom. Sci. Eng.Optimization of A Single-particle Micropatterning System with Robotic nDEP-TweezersIEEE Transactions on Automation Science and Engineering, 2022
- IEEE Trans. Biomed. Eng.Automated Embryo Manipulation and Rotation via Robotic nDEP-tweezersIEEE Transactions on Biomedical Engineering, 2021
- IEEE Trans. Biomed. Circuits Syst.Microchip System for Patterning Cells on Different Substrates via Negative DielectrophoresisIEEE Transactions on Biomedical Circuits and Systems, 2019
- IEEE ICRAAutomated Cell Patterning System with a Microchip using DielectrophoresisIn 2019 International Conference on Robotics and Automation (ICRA), 2019